System architecture
Three parts, one data flow.
Each boat carries a LoRa GPS tracker. A support-boat gateway collects every position over the mesh and hands it to a Raspberry Pi, which logs it to a database and serves the live dashboard.
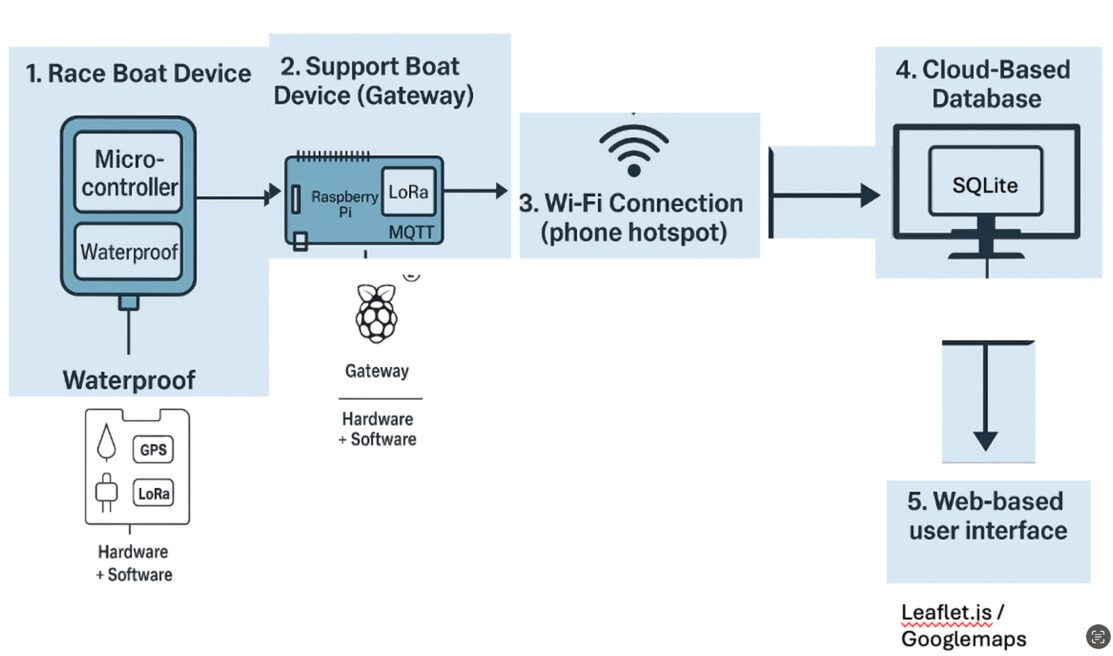
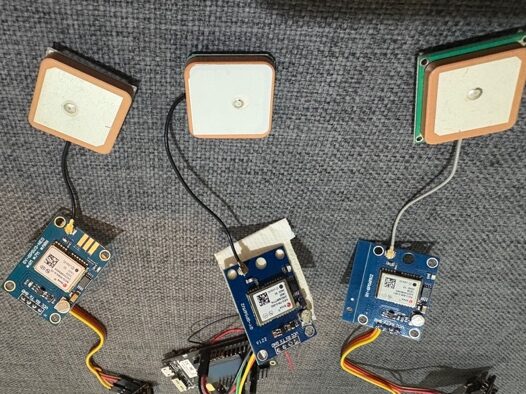
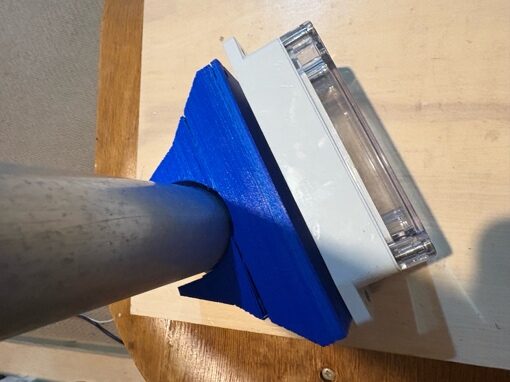
- Boat tracker — ESP32 microcontroller + LoRa module & aerial + NEO-M8N GPS + 3.7V battery, in a waterproof case on a 3D-printed mast mount
- Support-boat gateway — a TTGO LoRa32 board connected by USB to a Raspberry Pi 4 in a waterproof box
- Backend — Mosquitto MQTT broker + a Python listener, writing to a SQLite database
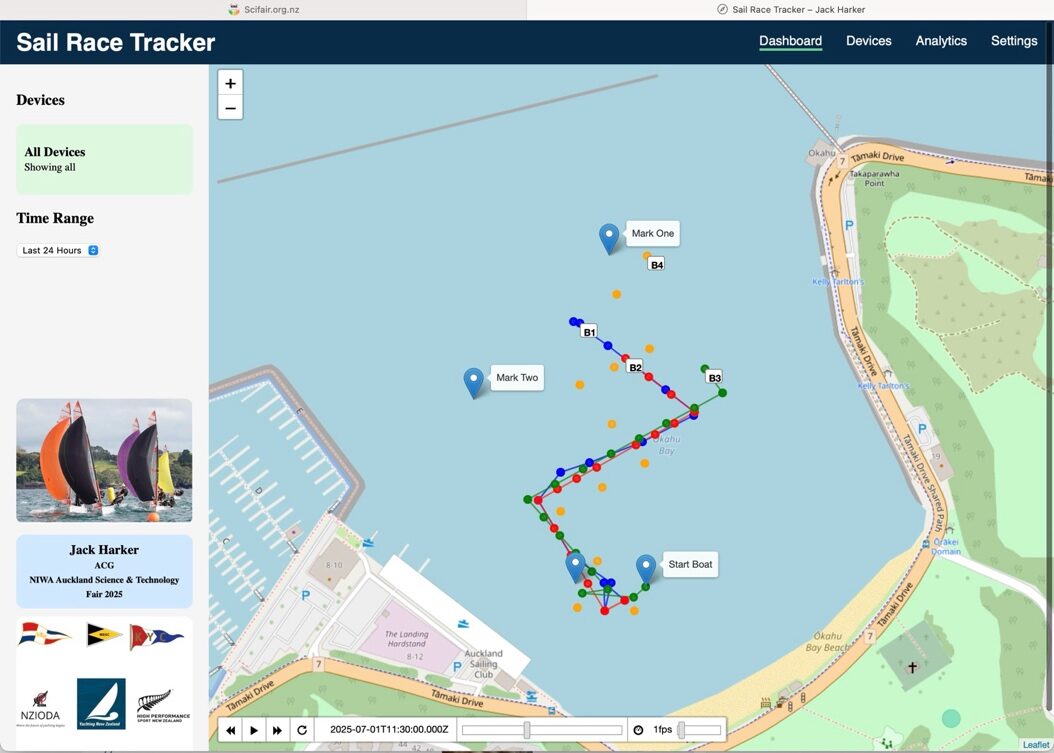
- Dashboard — a Flask API serving a Leaflet.js map to any browser